ElecrowのCAMプロセッサファイルを使ってPCBgogoのガーバデータを出力。
言われたとおりにドリルデータを RSー274x形式で送ったら
EXCELLON形式で送ってくれと言われました。
という事でElecrowのCAMファイルをそのまま使えます、というか変更したらダメです。
中国の新興PCB製造メーカー「PCBgogo」で基板を作りたいと思い
「メールファイルとCAMプロセッサはElecrowのを流用して良いか?」
質問したところ以下の返事をいただきました。
========================================================================
大丈夫です。elecrowはどのような基板を仕上げられるかは承知しています。
elecrowさんで起こせる基板はこちらで問題なく仕上げられます。
ガーバーデータはRSー274xの形式でご支給ください。
========================================================================
これによるとルールファイルはElecrowのを使ってチェックすれば大丈夫で
ガーバーデータのフォーマットをRSー274xの形式にすれば問題ないみたいです。
ということでガーバー出力ファイルのフォーマット変更の方法を簡単に説明します。
既にカーバーデータを出力したことのある人はお分かりだと思いますが。
まずは[CAM processor]アイコンをクリックして CAM processor を起動します。
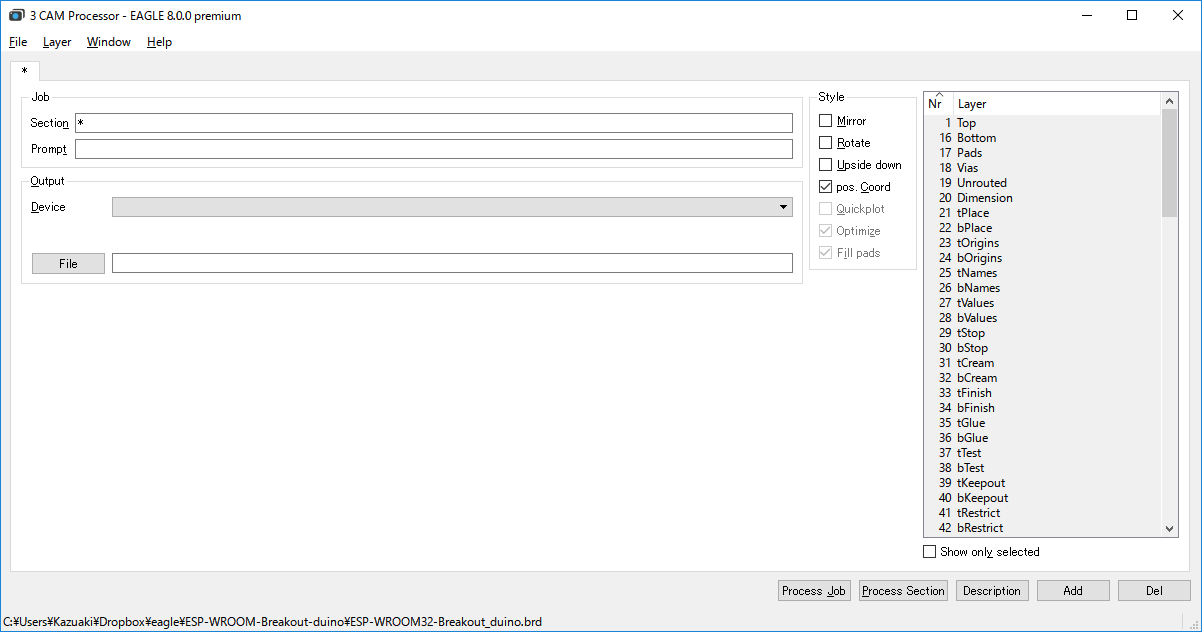
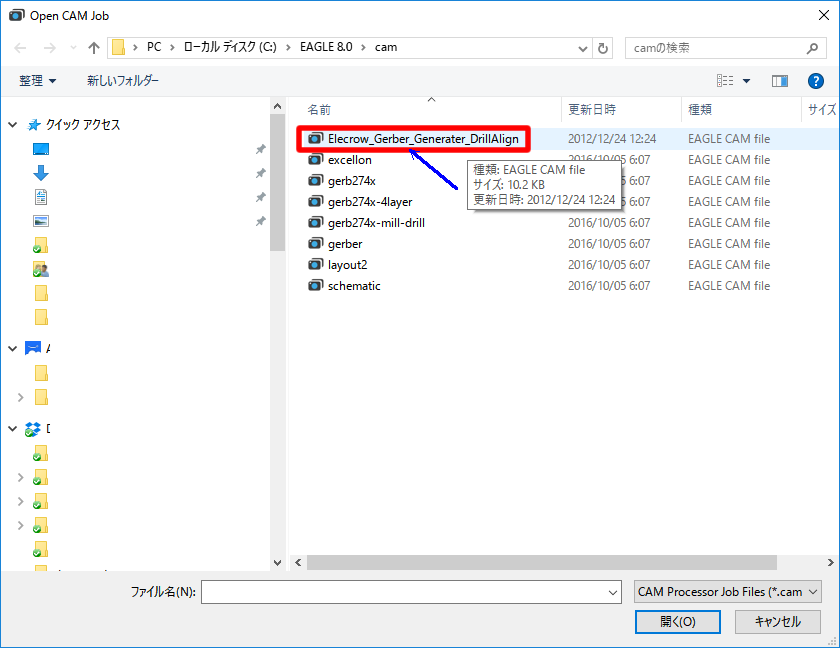
[File]→[Open]→[Job…] から Elecrowの販売ページからダウンロードした
[Elecrow_Gerber_Generater_DrillAlign.CAM] を選択します。
画面が以下のように変わります。
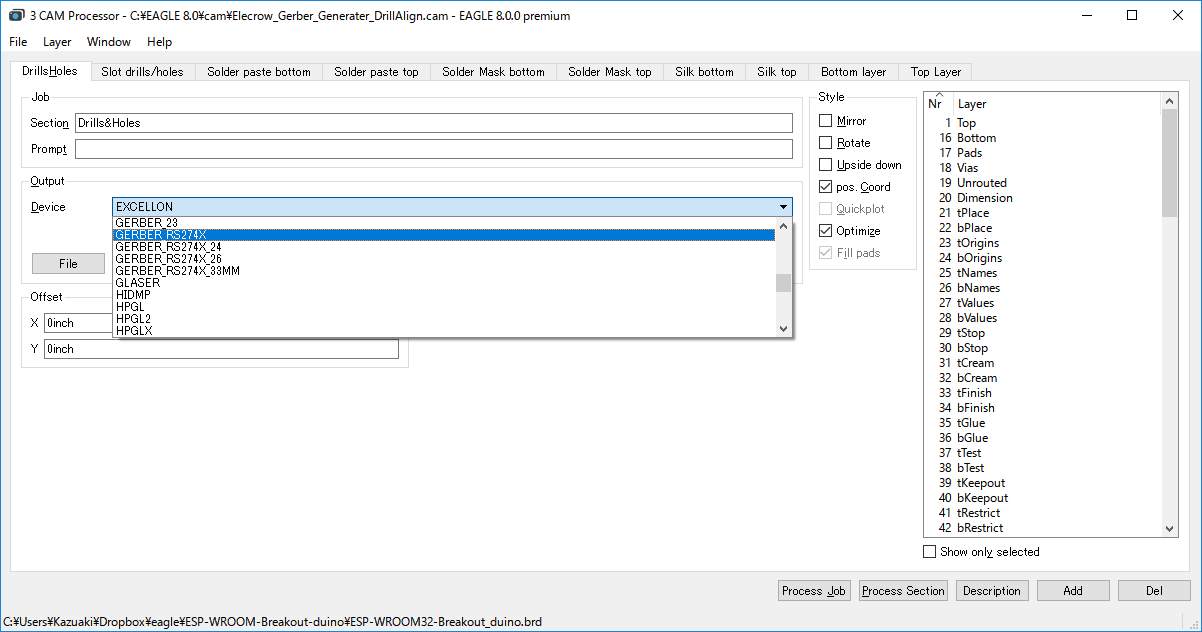
ここで DrillsHoles ページの Dewvice が EXCELLON になっているのを
GERBER_RS274X に変更します。

他のページは最初から GERBER_RS274X になっていると思いますが念のために確認して
違っていたら GERBER_RS274X に変更してください。
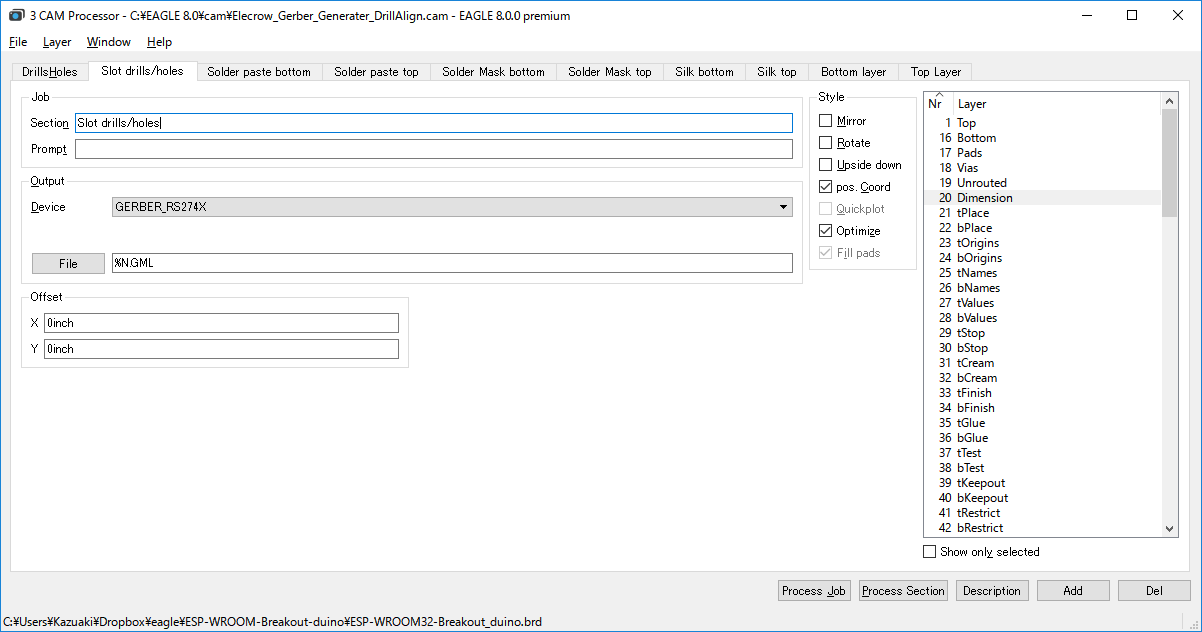
ProcessJob ボタンを押すと ガーバーデータが作成されます。